Deep-sea sonars and systems
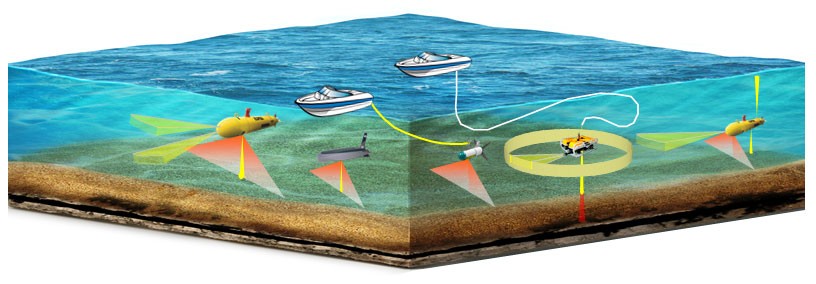 Deep-sea side-scan sonars "Hydra" is designed for installation on a variety of underwater vehicles: towed body, ROV, AUV, gliders, etc. Maximum immersion depth - to 1200m. Used to create on-Board sonar systems of various configurations. They are supplied in the form of independent products or as part of the sonar complex of a given degree of integration.
Deep-sea side-scan sonars "Hydra" is designed for installation on a variety of underwater vehicles: towed body, ROV, AUV, gliders, etc. Maximum immersion depth - to 1200m. Used to create on-Board sonar systems of various configurations. They are supplied in the form of independent products or as part of the sonar complex of a given degree of integration.
Deep-water electrical connectors can be used to connect the equipment under water.
| Function/purpose | Model | Characteristics |
|---|---|---|
| Side-scan sonars (SSS) - areal survey of waters; - search for objects on the bottom and in the water column; - engineering monitoring; - ecological monitoring; - depth measurement. |
Frequency = 700kHz; range = 120m; resolution = 1 cm; max. distance to bottom = 30m; working depth = 300m (1000m - optional); maximum depth = 600 m (1200m - option). Interface: Ethernet; power: =10..17V or =10..30V; the form-factor: monoblock. Options: built-in course sensors-roll-trim, depth; all-round view. |
|
| H5s3D | Frequency=300kHz; range=300m; resolution=3.5 cm; max. bottom distance = 100m; working depth = 300m (1000m option); maximum depth = 600m (1200m option). Interface: Ethernet; power: =10..30V (option - built-in batteries); design: monoblock. Options: built-in course sensors-roll-trim, depth; all-round view. |
|
| SSS + FLS (forward-looking sonar) |
H5sf7D | The frequency of SSS/FLS = 700/400 kHz; range = 120/100m; resolution SSS/FSL = 1/3 cm; max. distance to bottom = 30m; working depth = 300m (1000m - optional); maximum depth = 600 m (1200m - option). Interface: Ethernet; power: =10..17V or =10..30V;the form-factor: monoblock. Options: built-in course sensors-roll-trim, depth; all-round view. |
| Forward-looking locator - Ensuring the safety of navigation |
H5f7D | Frequency = 400 kHz; range = 100m; resolution VSL = 3 cm; max. distance to the bottom = 30m; working depth = 300m (1000m - option); maximum depth = 600m (1200m - option). Interface: Ethernet; power: =10..17V or =10..30V; the form-factor: monoblock. Options: built-in course sensors-roll-trim, depth. |
| Side scan sonar with built-in echosounder (SSSE) - Areal survey of waters; - search for objects on the bottom and in the water column; - engineering monitoring; - ecological monitoring; - safety of navigation; - depth measurement; - echo-sounding survey; - echo-sounding survey; with instrumental estimation. |
H5se3D | Frequency SSS/ES = 300/700 kHz; range = 300m; resolution SSS/ES = 3.5/1 cm; max. distance to the bottom = 100m; working depth = 300m (1000m - option); maximum depth = 600m (1200m - option). Interface: Ethernet; power: =10..30V (option - built-in batteries); design: monoblock. Options: built-in course sensors-roll-trim, depth. |
| H5se7D | Frequency SSS/ES= 700/1000 kHz; range = 120m; resolution SSS/ES = 1/1 cm; max. distance to the bottom = 30m; working depth = 300m (1000m - option); maximum depth = 600m (1200m - option). Ethernet interface; power: =10..17V or =10..30V; the form-factor: monoblock. Options: built-in course sensors-roll-trim, depth; all-round view. |
|
|
Bottom Profiler (PPF) |
H5p3D | Frequency = 300/6-30 kHz; ground penetration = up to 10m; resolution = 20cm; max. bottom distance = 20m; working depth = 300m (1000m optional); maximum depth = 600m (1200m optional). Interface: Ethernet; power: =10..17V or =10..30V; the form-factor: monoblock. Options: built-in roll-trim, depth sensors. |

SSS H5s7D
Frequency: 700khz, range: 120m, resolution: 1cm.
Deep sea SSS 700khz
SSS H5se7D
Frequency: 700/1200(sounder)kHz, range: 120m, resolution: 1/1(sounder) cm.
Deep sea SSSE 700khz

SSS H5se3D
Frequency:300/700(sounder)kHz, range: 300m, resolution: 3.5/1(sounder)cm
Deep sea SSSE 300kHz

Parametric profiler H5p3D
Frequency: 300/(6-30)kHz, penetration: 10m, resolution: 20cm.
Deep-sea bottom parametric Profiler

SSS+complex sonar H5sf7D
Frequency: 700khz SSS/400kHz CS
Deep sea integrated locator