Донное профилирование
Гидролокатор (сонар) и технология эхолокации была разработана в начале 20 века. Постоянно развиваясь и совершенствуясь, гидролокаторы позволили не только определять глубину, но и "увидеть" структуру дна и донных осадков.
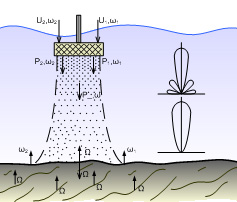
Многолетний опыт работ по экспериментальному определению профилей донной структуры (как в случае мелководья, так и для больших глубин) с помощью параметрического трансдьюсера показал, что его использование дает возможность создавать узкий луч на рабочей низкой частоте (существенно для сильно поглощающих донных слоев) при малом уровне бокового поля. Недостаток параметрического трансдьюсера - низкая эффективность - вполне окупается указанным преимуществом (получение с высоким разрешением сонограмм профилей донной структуры). Излучая с помощью трансдьюсера направленный акустический импульс в дно, ППФ "озвучивает" внешнюю окружающую водную среду и толщу дна. За счет нелинейного взаимодействия распространяющихся в одном направлении акустических волн в водном объеме образуются сигналы комбинационных частот. Вторичное поле генерируемых параметрическим трансдьюсером сигналов может представлять собой поле разностных частот взаимодействующих волн; суммарных частот; высших гармоник излучаемой частоты; многокомпонентных сигналов, содержащих ряд компонент разностных частот; сложных, например, линейно-частотно-модулированных (ЛЧМ) сигналов; самодетектированных сигналов.
Требования к увеличению глубины зондирования осадков обуславливают тенденцию понижения рабочей частоты. С другой стороны, требование высокого разрешения по времени приводит к расширению спектра зондирующих сигналов. Эти противоречия обуславливают необходимость использования сложных сигналов с большой относительной полосой. Указанная задача решается использованием параметрического профилирования, который обеспечивает работу с широкополосными сигналами, имеет высокую разрешающую способность по пространству при малых габаритах антенной системы. Малые размеры антенны при высоконаправленном излучении низких частот делают возможным установку параметрических приборов на судах малого водоизмещения и малогабаритных лодках.
Одним из наиболее важных качеств параметрических гидролокационных систем является возможность оперативной перестройки параметров зондирующих сигналов в достаточно широких пределах. Это позволяет адаптировать излучаемый сигнал к конкретной акустической ситуации. Необходимость такой адаптации возникает тогда, когда не известны и могут меняться в значительных пределах условия распространения и отражения волн, нет достаточной информации о структуре дна, нет эффективных способов выделения эхо-сигнала на фоне помех и т.д. Такая ситуация возникает при стратификации осадков, так как от типа грунта, необходимой глубины проникновения зависит тип зондирующего сигнала, его длительность, база сложного сигнала и другие его параметры, т.е. подобрав оптимальный зондирующий сигнал, можно в данном конкретном случае получить значительно больше полезной информации, чем при использовании гидроакустического средства, использующего зондирующие сигналы с фиксированными, наперед заданными, параметрами.
Исследования показывают, что благодаря высоконаправленному широкополосному излучению на низких частотах при малых размерах трансдьюсера, параметрические антенны для эффективного решения поставленной задачи практически не имеют конкурентов и позволяют, за счет перечисленных преимуществ, добиться хорошего разрешения, особенно в верхней части осадочного чехла.
Комплекс содержит один БА (моноблок), содержащий две передающих трансдьюсера накачки (высокая частота) и один приемный трансдьюсер для приема разностной низкой частоты. Ось диаграммы направленности БА направлена вертикально вниз (обеспечивается при установке БА на судне). Ширина диаграммы направленности БА является конической и составляет 3°. По мере движения судна озвученный на дне след перемещается, образуя траекторию обзора.
 Дно и другие объекты в толще дна отражают некоторую часть этой звуковой энергии обратно по направлению к БА (так называемое обратное рассеяние), время прихода отраженного сигнала записывается вместе с его интенсивностью. Излучение акустических импульсов выполняется периодически, образуя строки зондирования. Записанная информация каждой строки зондирования передается в компьютер для отображения на экране в виде массива из последовательности строк. Строки сдвигаются с тактом зондирования, образуя непрерывное изображение, при движении судна на экране формируется изображение дна - сонограмма.
Дно и другие объекты в толще дна отражают некоторую часть этой звуковой энергии обратно по направлению к БА (так называемое обратное рассеяние), время прихода отраженного сигнала записывается вместе с его интенсивностью. Излучение акустических импульсов выполняется периодически, образуя строки зондирования. Записанная информация каждой строки зондирования передается в компьютер для отображения на экране в виде массива из последовательности строк. Строки сдвигаются с тактом зондирования, образуя непрерывное изображение, при движении судна на экране формируется изображение дна - сонограмма.
Сонограмма на экране монитора компьютера комплекса является акустической «фотографией» (изображением) вертикального сечения толщи воды и дна. Коэффициент рассеяния у различных типов грунтов и предметов различен. Это приводит к тому, что интенсивность эхосигналов от различных участков (слоев) дна также будет различной, что отображается на акустическом изображении различной яркостью точек. Данный метод позволяет также оценить и глубину акватории вдоль профиля наблюдения (под собой).
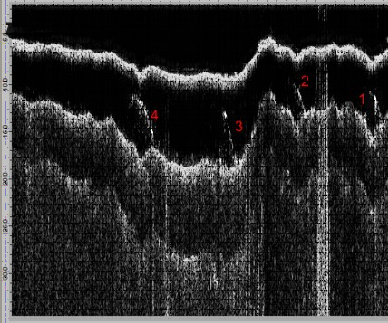 Величина отраженного эхо-сигнала зависит от множества различных факторов: затухание акустической волны в воде, отражающей способности элементов дна, наклона рельефа и др. В зависимости от типа грунта меняется и глубина проникновения.
Величина отраженного эхо-сигнала зависит от множества различных факторов: затухание акустической волны в воде, отражающей способности элементов дна, наклона рельефа и др. В зависимости от типа грунта меняется и глубина проникновения.
ППФ содержит один приемопередающий тракт, состоящий из генератора, усилителей мощности и приемного тракта. Генератор обеспечивает формирование двух синхронных зондирующих импульсов (ЗИ) высокой частоты накачки с заданными параметрами. Сформированные ЗИ усиливаются усилителями мощности и излуча передающими трансдьюсерами БА, погруженным в воду, в окружающее водное пространство. Принятый приемным трансдьюсером БА эхо сигнал проходит через тракт приема, где усиливается и преобразуется в цифровой вид. Период зондирования определяет максимальную глубину (чем больше период, тем больше глубина, и наоборот).
Вся информация о сканируемом пространстве и положении БА поступает в компьютер. Компьютер обеспечивает ее обработку, отображение в реальном времени и архивирование. В дальнейшем информация может подвергаться вторичной обработке.
При вторичной обработке можно выделить следующие основные задачи:
- определение глубины (линии дна)
- стратификация осадков
- выкладка планшетов исследуемых полигонов;
- работа с конкретными объектами (выделение интересных объектов и контуров характерных участков, измерение координат объектов) и др.
По результатам вторичной обработки может выпускаться отчет.
Наличие на борту систем ориентации позволяет учитывать положение БА (судна) при обработке данных.
Для корректной работы ППФ необходимы:
- подсистема навигации, обеспечивающая определение координат БА (судна);
- подсистема датчиков, состоящая из датчиков определения текущего положения БА (судна): крен-дифферент-курс и датчика измерения профиля скорости звука.
Отсутствие последних двух систем может приводить к ошибкам, вызванным качкой судна, неидеальностью его проводки и меняющимися характеристиками воды. Если полученная информация от ППФ не используется для определения положения объектов с высокой точностью (достаточно точности в единицы метров), достаточно использовать только приемник навигации для привязки получаемого изображения к координатам. Окончательное решение об использовании дополнительных подсистем должно приниматься каждый раз, исходя из конкретной задачи и условий съемки.
Координаты и положение судна в пространстве могут быть введены не только от специальных систем, но и определяться любым другим доступным способом. Для этого достаточно только с помощью файлов специального формата ввести эту информацию в компьютер при вторичной обработке.
ОБОРУДОВАНИЕ ДЛЯ ДОННОГО ПРОФИЛИРОВАНИЯ:
Донные профилографы
ПРИМЕРЫ:
Вставить материал